



Japan’s Skyscraper Factories

One interesting thing about the building construction productivity puzzle is that it’s a worldwide phenomenon. Unlike with say, healthcare, or transit, or car manufacturing, where we have examples of other countries with different systems that perform far better, in building construction, especially homebuilding, almost everyone seems to be in a pretty similar boat. Around the world we see different capital/labor tradeoffs, different levels of prefabrication, and different building systems, but they mostly get similar results in terms of costs.
The upshot is that there’s a huge number of examples of people around the world trying to solve the problem, which often look much different than the solutions that have been attempted in the US.
One of these examples comes from Japan. Starting in the late 1970s, Japan’s large construction companies began investing huge amounts of time and money into construction robotics research, culminating in the creation of automated building factories designed to construct entire skyscrapers. Rather than the “conventional” industrialized building approach, where construction work is moved into an off-site factory, these systems moved the factory onto the jobsite. They thus avoided one of the fundamental challenges of off-site construction (though as we’ll see, they got a whole new set of challenges in exchange).
Japan’s Construction Robots
Robots were first brought to Japan from the US in the late 60s, and they quickly took root in the manufacturing sector. Kawasaki began producing their first industrial robot (a licensed version of the Unimate) in 1969, and Toyota began using robots on their assembly lines as early as 1974. Starting in the late 1970s, Japan’s large construction contractors, with the assistance of MITI, began investing heavily in developing robots capable of performing construction tasks. Heavy construction in Japan was (and still is) dominated by a few large firms (known as the Big Five or Big Six), which all invested heavily in R&D as part of their normal operations. Japan had traditionally had high construction costs (driven largely by labor costs) and difficulty finding enough skilled labor, and they also observed the same trend of stagnating construction productivity that we’ve seen in the US. Construction robots seemed to offer a potential solution.

The result was the development of a series of construction robots, starting with the world’s first construction robot (the SSR-1, designed to spray fireproofing) in 1983. These initial robots were single-task construction robots, built to perform one specific function such as finishing concrete, inspecting tile, welding, or spray painting. By the 1990s over 100 different types of single task construction robots had been developed in Japan.

Results from these efforts were mixed. Though the robots could often perform their tasks extremely efficiently, they required a great deal of setup and teardown time, and often encountered difficulties in buildings that hadn’t been specifically designed to accommodate them (such as narrow spaces that the robots couldn’t reach). They also had trouble dealing with the somewhat unpredictable nature of a conventional construction site - their need to work uninterrupted, combined with safety limits on how closely workers could approach, tended to constrain the rest of the construction process. And even when tasks could be completed faster, it often meant that the bottleneck just shifted to some other part of the process, limiting the overall benefit.
The response to this was to lean further into robotics and automation - if robots couldn’t function effectively in a conventional construction environment, then the entire construction process would be changed to accommodate them. Starting in the mid 1980s, Japan’s construction robot development shifted away from individual robots, and towards creating an entire robotic construction site. Instead of a series of isolated tasks, individual robotic workstations would be linked and integrated into a single unified production system - an automated factory capable of spitting out an entire building.
The Skyscraper Factories

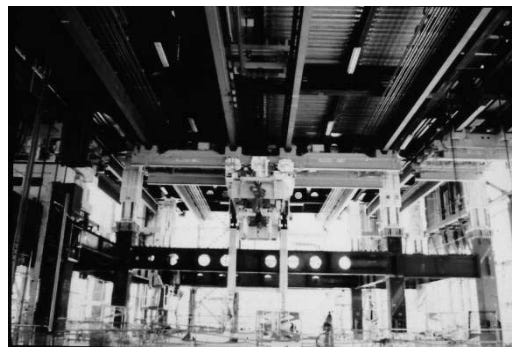
Though they were developed by many different companies, these building factories all used the same basic group of technologies. They all featured some type of automated conveying system, usually a series of hoists and rail-mounted cranes that could raise material and components up to the “factory floor”, and then move them into position. These systems were designed to allow material to be supplied and moved in a “just-in-time” manner, to avoid large volumes of inventory.
Buildings would generally be constructed from prefabricated components, such as precast floor panels or pre-built façade panels. Once moved into position, additional work would be done with the help of single task construction robots - most systems for instance had robotic welders for splicing steel columns together.
The systems also all included some sort of climbing mechanism. As floors were completed, the entire factory would be raised up, and construction would start on the next floor above (due to the expense of dismantling it, the factory structure would sometimes be incorporated into the final building). To protect the “shop floor” from the outside elements, the systems often incorporated a cover around the entire top of the building.
To facilitate robotic assembly, the buildings would generally be designed to accommodate the robot’s capabilities - layouts were tweaked, connections were redesigned, assemblies were simplified, etc. The goal was to turn the entire construction site into a structured environment more conducive to robotic assembly.
For whatever reason (collusion? mimetic desire? bandwagon effect?) almost every large Japanese construction company developed some variation of this basic system. And they weren’t merely concepts or prototypes - they were all used to construct actual buildings. Let’s look at a few of them.
SMART System - Shimizu

In many ways the SMART system is a fairly typical example of these sorts of building factories. SMART (Shimizu Manufacturing system by Advanced Robot Technology) consisted of a series of gantries and horizontal hoists that spanned the extents of the building, with vertical lifts at the edge for delivering material. Up to 25 vertical lifts could be installed, avoiding potential bottlenecks from vertical transportation without the expense of adding an entire crane.
SMART-built buildings consisted of a structural steel frame, with precast concrete floor slabs and prefabricated façade panels, all of which could be moved into position by the automated horizontal hoists. Welding robots were used to connect the steel beams and columns after they were moved into position, with a laser measurement system ensuring placement accuracy. Each component was tracked with a barcode to measure overall construction progress and keep track of material.
The system was mounted to the top of the building, and covered the top four floors (the bottom several floors of the building had to be built by conventional methods). Once SMART was in place, all work was done inside the “factory” - work proceeded on multiple floors simultaneously, with structural framing being installed on the top floor while finishing work was completed below. When ready, the entire factory would be raised up using jacks, a completely finished floor would pop out beneath, and work would start on the next floor.
Shimizu was one of the first companies to develop construction robotics, and their SMART system was one of the first automated building systems to actually be used. Testing of it began in the late 80s, and in 1991 it was used to construct the Juroku Bank building. Shimizu also developed several variations on this system, such as one that was mounted to exterior steel masts rather than the building itself, and a version for building broadcast towers.
Akatuki 21 - Fujita + Others
Developed by a consortium of 5 companies, Akatuki-21 was in many ways similar to Shimizu’s SMART system. The main difference was that, in conjunction with the “sky factory” on top of the building, there was also a “ground factory” at the base. The ground-based factory would receive parts and materials, and assemble them into higher level-of-completion components (such as floor panels). These would then be transferred up to the “sky factory” above using lifts.
Like SMART, Akatuki was also based around a structural steel building assembled using automated lifts and robotic welding equipment. But instead of precast, Akatuki seems to have used cast-in-place concrete - its horizontal transport systems included attachments for the placing and leveling of concrete.
The Akatuki system was also designed for building deconstruction, running the assembly process in reverse for a building that needed to be torn down (though it’s unclear if it was ever actually used for this). Safely tearing down a building in Japan’s dense urban areas was apparently a significant challenge, and there were several other automated factory systems designed purely for building disassembly.
Akatuki was first used in 1994 for the construction of the Shuyodan Headquarters building.
Big Canopy - Obayashi

Unlike other systems (which almost always used structural steel or a hybrid of steel and concrete), Big Canopy was designed for use with precast concrete. It was a comparatively manual system, and consisted of 4 large steel masts that supported a platform-based gantry system, and thus was not mounted to the building itself. It was built to work with specially-designed precast concrete members, and was first used in 1995 on the Yachiyodai condominiums.
In addition to Big Canopy, Obayashi also had a system very similar to Shimizu’s SMART called ABCS (Advanced Building Construction System).
T-Up - Taisei

T-Up (Totally Mechanized Construction System for High-rise Buildings) was another system similar to SMART, but arranged in a slightly different configuration. Rather than building an entire floor at once, T-Up first constructed a steel-framed core, which a cantilevered platform (called a ‘hat truss’) was mounted too. The platform would climb the steel core, and then construct the rest of the floor below (using the now-familiar automated gantries). The platform eventually became the top floor of the building.

T-Up could also be supplemented with single-task construction robots for finishing work, material transportation, component manufacturing (for things like facade and floor panels), and a variety of other tasks.
T-Up was first used in 1992 on the Mitsubishi Heavy Industries building.
Others
There were a variety of other systems. Some, like MCCS, FACES, and ABCS, were additional variations on the same basic concept: a covered climbing platform, automated material movement, and a series of single-task construction robots, all used to build a steel-framed building. Others used the same components in a different configuration - AMURAD, developed by the Kajima company, opted to keep the factory on the ground floor and instead raise up the entire building as each floor was completed. Some systems were designed to only erect a portion of the building in an automated fashion, with the rest built by conventional construction. Both Shimizu (Hybrid SMART) and Obayashi (Hybrid ABCS) had systems like this. And some, like HAT Down by the Takenaka Corporation, were designed purely for building deconstruction.
Successes and Failures of the Automated Factories
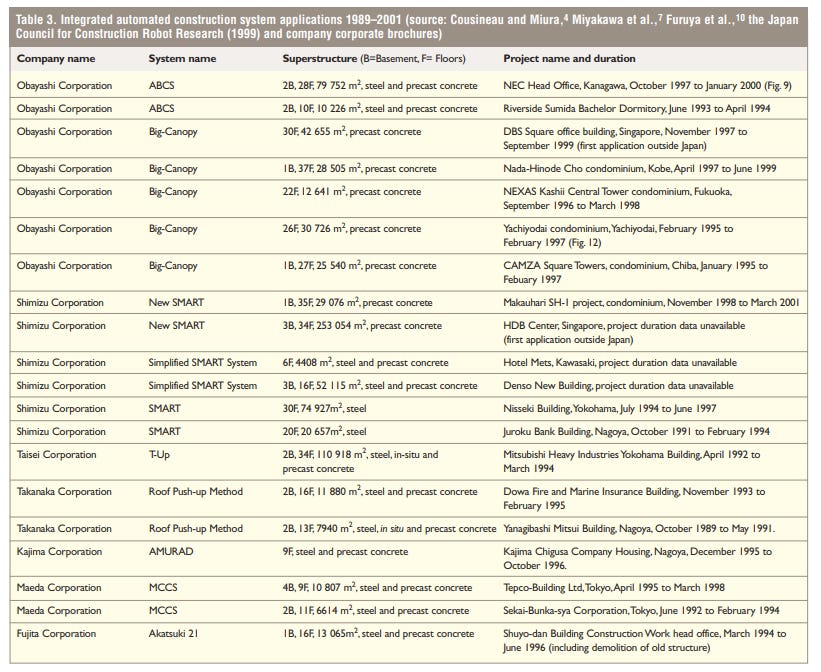
During the 90s, these systems were widely deployed - it’s unclear how many buildings were built with them, but Bock 2013 documents at least 60 instances of their being used in some fashion. Some systems such as Akatuki 21, seem like they were only used on a single building. Others, like Shimizu’s SMART and Obayashi’s ABCS and Big Canopy, were used repeatedly.
Considerable effort was spent on analyzing these systems' performance. Nearly all showed some degree of labor reduction, between 20% and 70% depending on the task being performed. Big Canopy required just 25% of the labor to erect a floor as a more traditional precast system, and T -Up required 70% fewer working-hours than conventional construction required.

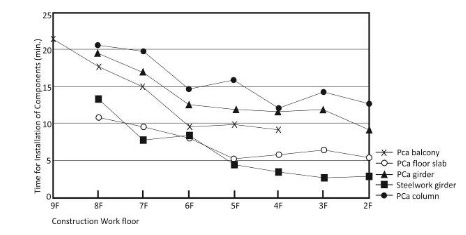
SMART, AMURAD, and ABCS also showed labor productivity improvements. Productivity improvements were also seen within single projects - as they progressed, and workers fell into a rhythm, performance would improve, with later floors being built faster than earlier floors (similar effects are seen on conventional construction sites).
The other frequently cited benefit was in construction speed. Even with the initial factory setup time (typically 1 month, though in some cases it could take up to 2-3 months), the buildings could be built significantly faster than conventional construction. ABCS claimed a 2-3 month savings for a 20 story building, and a 6 months savings for a 40 story building:

Shimizu found that a 15% savings in construction period with their SMART system, though this required a large enough building to overcome the initial long setup period for the factory:

Something similar was found with the MCCS system - when the building was too short (in their case 8 stories), no time savings was obtained.
Other benefits were found as well. Construction defects were apparently reduced (though I can’t find any specific data on it) The protective covering meant fewer days were lost to inclement weather. By some metrics the work environment was less taxing - Obayashi apparently measured the heart rates(!) of their workers on the Big Canopy system and found a noticeable decrease. There was also less construction waste - Shimizu documented a 70% decrease in waste on buildings using the SMART system.
However, there were drawbacks of the systems as well. The long factory setup time made them impractical for smaller buildings, and even on buildings that were large enough, extensive upfront design and coordination was required to design the building for robotic assembly. In some ways, the move from single-task construction robots to fully automated construction sites just shifted where the difficulties occurred - instead of a long setup (and takedown) time for each individual task, now you had one enormous and costly setup over the entire first portion of the project.
And the expense of the systems, combined with the relatively modest gains in construction time, meant they had significant payback periods. Kajima calculated that AMURAD would theoretically pay for itself in about 8 buildings, meaning it would take at best 20 years before a positive return on investment would be seen.
The Automated Building Systems Today
Despite being relatively recent (many of these systems were in use in the early 2000s), and the amount of enthusiasm surrounding them, none of these building factory systems appear to currently be in use. I can’t find any recent examples of buildings built using any of these methods, and pictures of the factories in action all seem to be of the same several buildings. None of the systems seem to be mentioned in any of the companies’ annual reports (though both ABCS and Big Canopy are mentioned in Obayashi’s 2004 report), and I can’t find any mention of them on any company websites. A steady stream of publications can be found through the 1990s and into the early 2000s, and then stops.
The one exception here is Shimizu, which seems to be continuing to develop construction robots, as well as a system for integrating them into an entire jobsite (the Shimizu Smart Site). They show what looks like some testing environments for a new generation of robots (doing many of the same tasks as previous construction robots), as well as an artist's rendering of the now-familiar-looking building factory. It’s unclear if this latest iteration has actually been used anywhere.

Why Didn’t the Building Factories Succeed?
The building factories were an interesting angle on the problem of construction productivity, but they ultimately seemed to have similar limitations as off-site industrialized building systems. Namely, they had extremely high up-front costs (since they required a large amount of heavy, complex equipment) and comparatively low volumes (since each factory could build just a single building at a time). Construction speed was improved, but only on large enough buildings (screening off buildings that were just a few stories, the vast majority of construction), and only marginally.
And this created a vicious circle - the relatively modest productivity improvement meant buildings still took months or years to construct. This meant feedback on their performance came excruciatingly slowly, making it hard to iterate and improve on the systems. Low rates of improvement meant that the required payback period was high, which meant that it was hard to justify further development. It’s hard to iterate on an idea until it clicks when each iteration costs hundreds of millions of dollars to run, and your feedback trickles in over a period of months or years. It was only the huge size of the Japanese construction companies and their willingness to sink huge sums on R&D that allowed these experiments to be run at all.
These posts will always remain free, but if you find this work valuable, I encourage you to become a paid subscriber. As a paid subscriber, you’ll help support this work and also gain access to a members-only slack channel.
Construction Physics is produced in partnership with the Institute for Progress, a Washington, DC-based think tank. You can learn more about their work by visiting their website.
You can also contact me on Twitter, LinkedIn, or by email: briancpotter@gmail.com
(For further reading, check out Automated and Robotic Construction: Integrated Automated Construction Sites, a 2013 dissertation on this topic, and Construction Robots, the Search for New Building Technology in Japan)
Just wanted to say that I appreciate the time & energy you put into each of these posts. As a supply chain/logistics/continuous improvement geek, this checks a lot of boxes for me.
Great related read here: https://www.notboring.co/p/apt-the-natively-integrated-developer-8b8